Designing and producing UAVs since year 2000:
Since year 2000, CATUAV team has developed more than 35 different UAV platform models, including fixed-wing, VTOL, helicopter and multirotor platforms. We have experience both with fuel and electric engine, even including the participation in solar UAS research projects aiming for unlimited endurance. We have equipped our systems with all sorts of automatic pilot, including open-source and commercial solutions, and we even developed our own automatic pilot back in 2005.
All this experience and acquired know-how allows us to completely develop and produce new custom UAS, that properly meet the user requirements when the solutions already available in the market are not enough.
If you want to know more about CATUAV capabilities you can read about some of our most relevant projects below or check our know-how list.


Firefighting Drone – 2014
TAF Helicopters commissioned CATUAV to develop a new and improved version of the ARGOS platform to complement the services it has provided with helicopters since 1963. The main objective was to monitor forest fires with a thermal camera at night, flying during the time when manned airplanes are not allowed to operate. During the project CATUAV developed a new launching ramp that allowed the system to be operated anywhere, a parachute recovery system for emergency ...
TCAS for Mini Drones – 2011
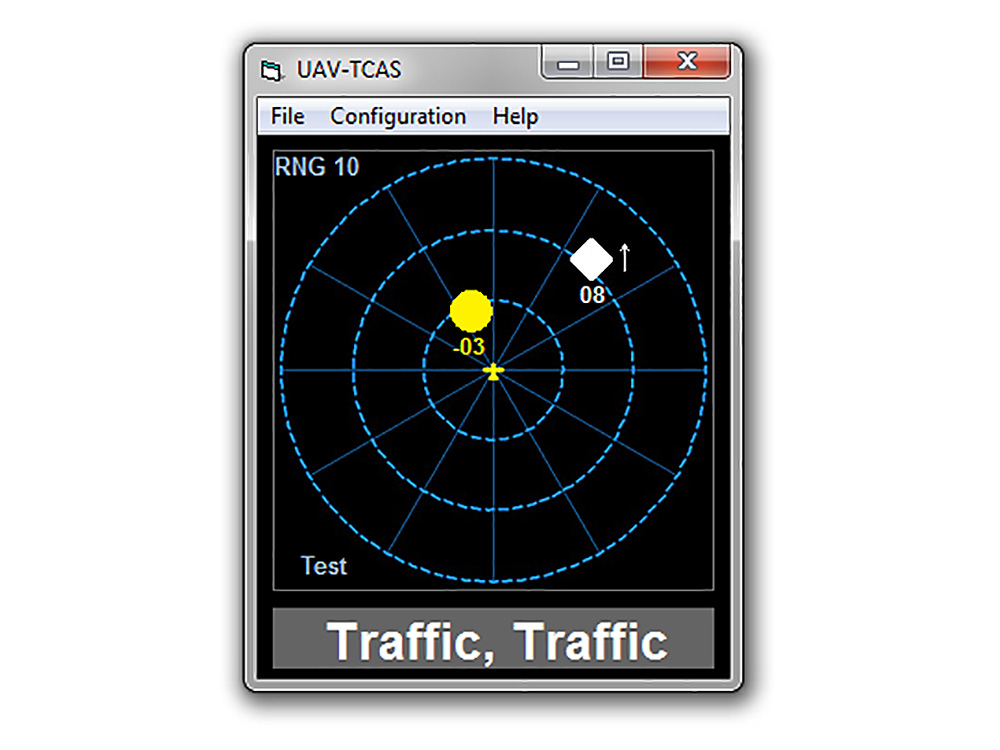
This project was funded in 2011 by GSA (European Global Navigation Satellite Systems Agency) after CATUAV won the Galileo Masters Award for the best EGNOS application. Thanks to this project CATUAV designed and developed a TCAS (Traffic Collision Avoidance System) for mini drones that took advantage of hardware already on-board the System to send the position to the other aircrafts. As mini drones are critical in weight and transponders used to be heavy an expensive, ...

ITUMA – 2008 to 2010
ITUMA (Investigación de Tecnologías para un sistema integral UAV para control del Medio Ambiente) was a project subsidized by ACCIÓ that allowed CATUAV to strengthen its technological base. This project lasted for 3 years and brought together 4 companies (Aurensis, CATUAV, Geovirtual and Pildo Labs) and 2 subcontracted public agencies (CTAE and Institut de Geomàtica). The aim was to develop and test all necessary technologies to bring Earth observation environmental drone applications into a market stage. For CATUAV ...

ARGOS – 2008
In order to solve the difficulties encountered during the operation of the FUROS we decided to design a completely new aircraft: the ARGOS. A new engine was used and the configuration was completely changed. Thanks to these changes we managed to completely solve the problems of engine reliability, we got much more space for the payload and the autonomy was considerably increased. Thanks to the ARGOS we were able to experimentally develop and operate the ...

FUROS – 2006
In 2006 we decided to complement the CATUAV electric propulsion fleet with a new model with greater load capacity and longer autonomy. The FUROS, with an endurance of 6 hours and a payload of 5 kg (fuel included), achieved its objectives. We used this fuel powered platform to develop and test our own long distance telemetry, video link and control mission software. We learned a lot with this project, it served to gain experience in ...