Year: 2011.
Project type: Galileo Masters Award funds.
Participants: 1 Enterprise.
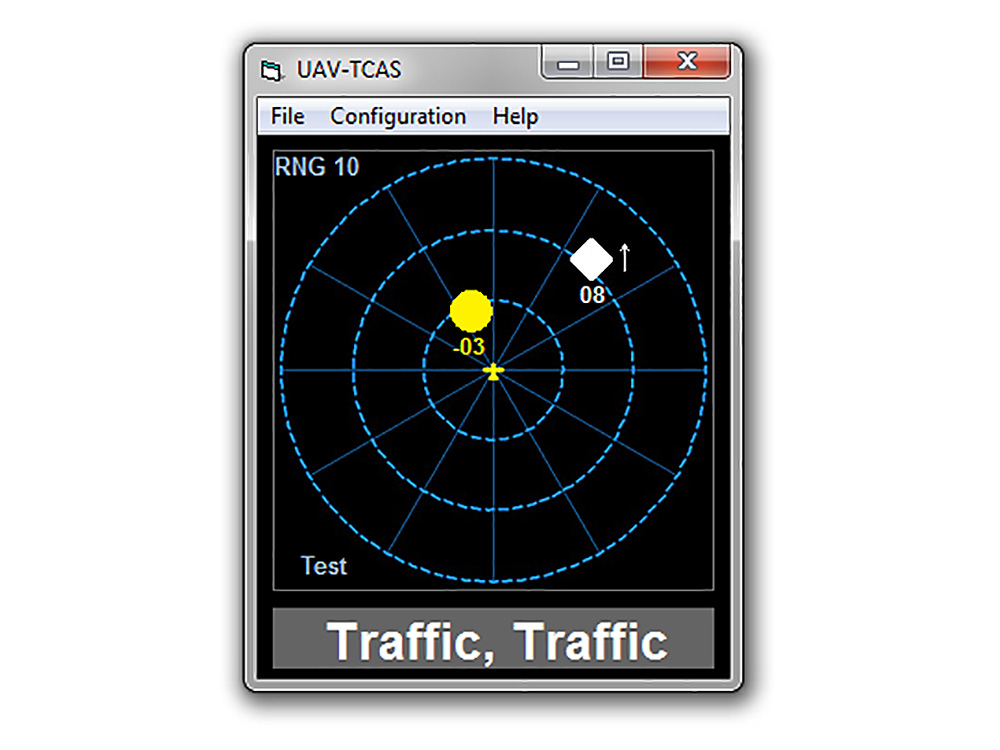
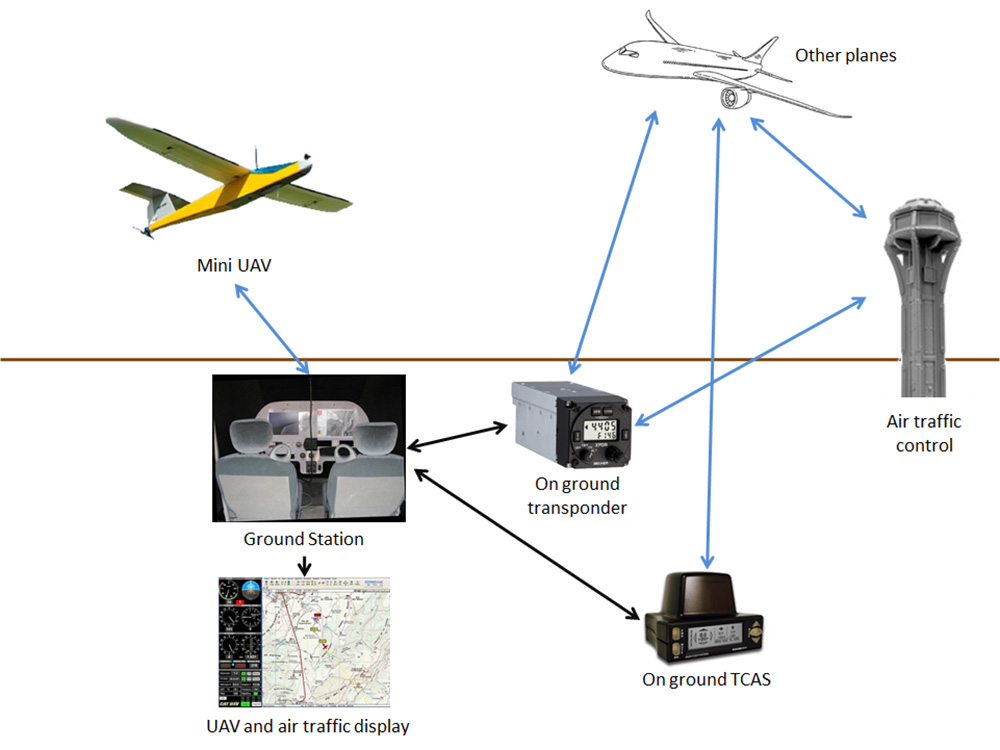
This project was funded in 2011 by GSA (European Global Navigation Satellite Systems Agency) after CATUAV won the Galileo Masters Award for the best EGNOS application. Thanks to this project CATUAV designed and developed a TCAS (Traffic Collision Avoidance System) for mini drones that took advantage of hardware already on-board the System to send the position to the other aircrafts. As mini drones are critical in weight and transponders used to be heavy an expensive, having a solution that didn’t required integrating any new hardware on-board supposed a major feature for our drones.