In this section you can find a list of the most relevant Research and Development projects in which CATUAV has participated since 2000:

ARGOS – 2008
In order to solve the difficulties encountered during the operation of the FUROS we decided to design a completely new aircraft: the ARGOS. A new engine was used and the configuration was completely changed. Thanks to these changes we managed to completely solve the problems of engine reliability, we got much more space for the payload and the autonomy was considerably increased. Thanks to the ARGOS we were able to experimentally develop and operate the ...
Read More
Read More
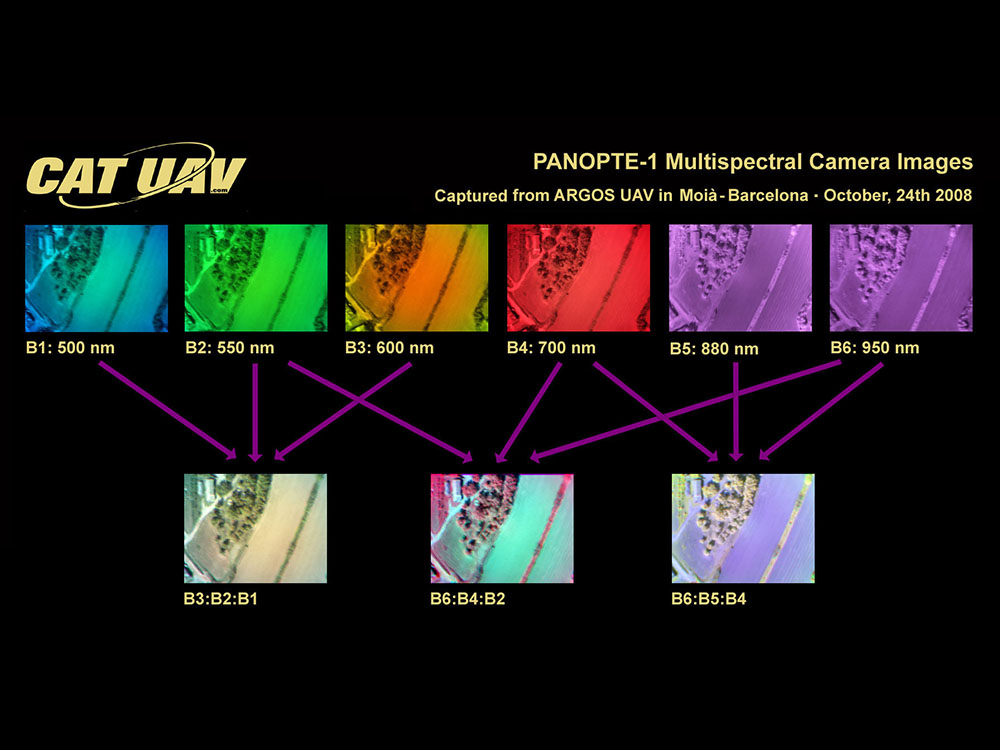
PANOPTE MULTISPECTRAL CAMERA – 2008
Before the appearance on the market of Micasense, Mapir, Parrot and DJI multispectral cameras, the only commercial option for multispectral cameras was offered by Tetracam, which, apart from being very expensive, due to their size and weight was not intended to be integrated into a small UAVs such as Atmos. Thanks to the experience of Dr. Manuel Castillo Fraile in remote sensing projects, CATUAV managed to develop a three-band camera based on the FOVEON sensor ...
Read More
Read More

FUROS – 2006
In 2006 we decided to complement the CATUAV electric propulsion fleet with a new model with greater load capacity and longer autonomy. The FUROS, with an endurance of 6 hours and a payload of 5 kg (fuel included), achieved its objectives. We used this fuel powered platform to develop and test our own long distance telemetry, video link and control mission software. We learned a lot with this project, it served to gain experience in ...
Read More
Read More

MINI UAV SURVEILLANCE SYSTEM – 2003 to 2007
The first major project of CATUAV was the development of a small and portable fixed-wing UAV system capable of performing real time surveillance tasks. The project was financed by Indra, that at that time was willing to get introduced in the emerging civilian drone market. During those years it was impossible to buy at an affordable price the basic drone systems. This lead CATUAV team to develop our own autopilot, mission control software, telemetry system, ...
Read More
Read More

Ground Control Station – 2000 until now
Throughout the years, CATUAV has designed and built several ground control stations (GCS), both fixed and mobile. The first GCS was nothing more than a backpack with a receiver and all required electronics, a hat with a directive antenna that was oriented by turning the head and SONY glasses designed in the 90's to watch DVDs from which the user could get real time video data to pilot the system in First Person View (FPV) ...
Read More
Read More