07 Set CATUAV desenvolupa un sistema TCAS
Posted at 18:29h
in News
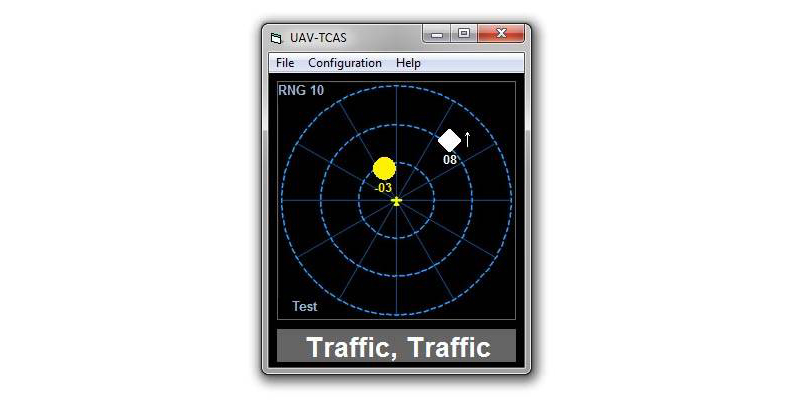
Amb l’objectiu de facilitar la integració dels sistemes mini-UAV dins l’espai aeri controlat, CATUAV va començar fa uns mesos el desenvolupament d’un complet sistema TCAS (Traffic Collision Avoidance System). Aquest sistema es basa en el mateix protocol i xarxa de comunicacions que fa servir l’aviació general i no requereix la instal·lació de sistemes a bord de l’UAV. El projecte, que té el suport financer de la GSA i d’ACC1Ó, començarà aquesta tardor la fase de proves.