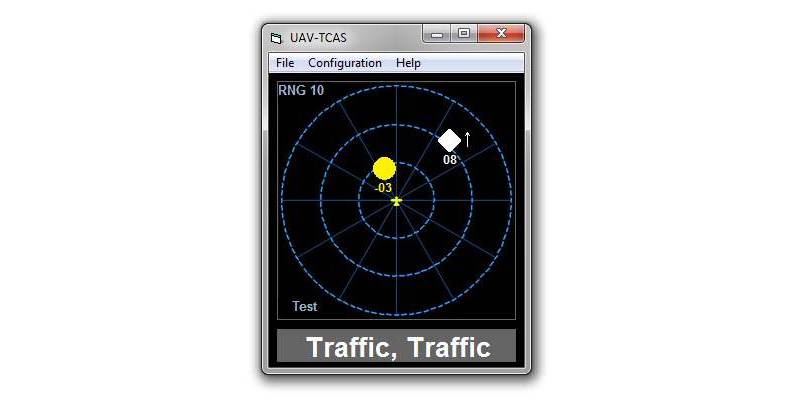
07 Sep CATUAV develops a TCAS system
Posted at 18:29h
in News
In order to facilitate the integration of mini-UAV systems in controlled airspace, CATUAV began several months ago the development of a complete TCAS system (Traffic Collision Avoidance System). This system is based on the same protocol and communications network used by general aviation and does not require the installation of systems on board the UAV. The project has the financial support of the GSA and ACC1Ó and this fall will begin the testing phase.