Software integration and development:
On its beginnings, CATUAV had to develop a full software package for UAS operation and control because of the lack of available solutions in the market. Furthermore, our vocation is to be always working in cutting edge UAS technology and applications, which usually forces us to develop custom software packets for both UAS control and data processing.
Having the most suitable suite of software is key in order to properly deploy any UAS application. Our background has given us a deep knowledge of the most relevant software solutions available in the market, so we can analyze the needs of your project and select the best software tools to apply. And if there is no available solution, we can always design and develop custom new software for it.
If you want to know more about how our capabilities can benefit your project check our know-how list or read about some of our most relevant projects below:
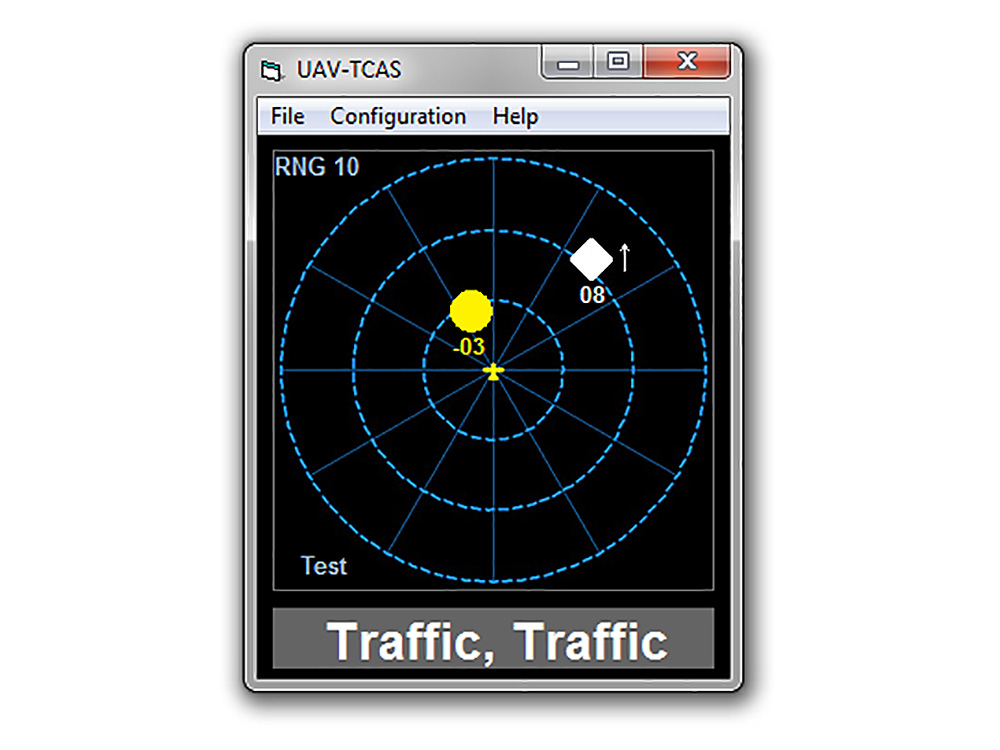
TCAS for Mini Drones – 2011
This project was funded in 2011 by GSA (European Global Navigation Satellite Systems Agency) after CATUAV won the Galileo Masters Award for the best EGNOS application. Thanks to this project CATUAV designed and developed a TCAS (Traffic Collision Avoidance System) for mini drones that took advantage of hardware already on-board the System to send the position to the other aircrafts. As mini drones are critical in weight and transponders used to be heavy an expensive, ...
Read More
Read More

SAFEDEM – 2011 to 2014
SAFEDEM (Space Asses For Enhanced De Mining) was a project funded by the European Space Agency (ESA) to validate the use of both satellite and drone imagery to help in the demining activities. CATUAV participated in the project with the acquisition of multispectral data in the visible, near-infrared and thermal bands. Two flight campaigns were carried out in Bosnia in partnership with the BIHMAC (Bosnia & Herzegovina Mine Action Center) in order to test the ...
Read More
Read More
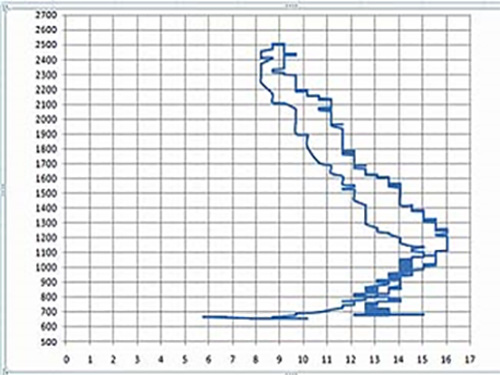
FLUXPYR – 2009 to 2012
CATUAV and the Catalan Institute for Climate Science (IC3) closed an agreement to conduct a flight campaign to measure the levels of CO2 in the atmosphere. These flights were part of the FLUXPYR project and are intended to complement and contrast the observations of the IC3 network of atmospheric stations. CATUAV performed a special integration for the CO2 probe in the Atmos-5 UAV platform, specific calibration flights and sounding campaigns ...
Read More
Read More

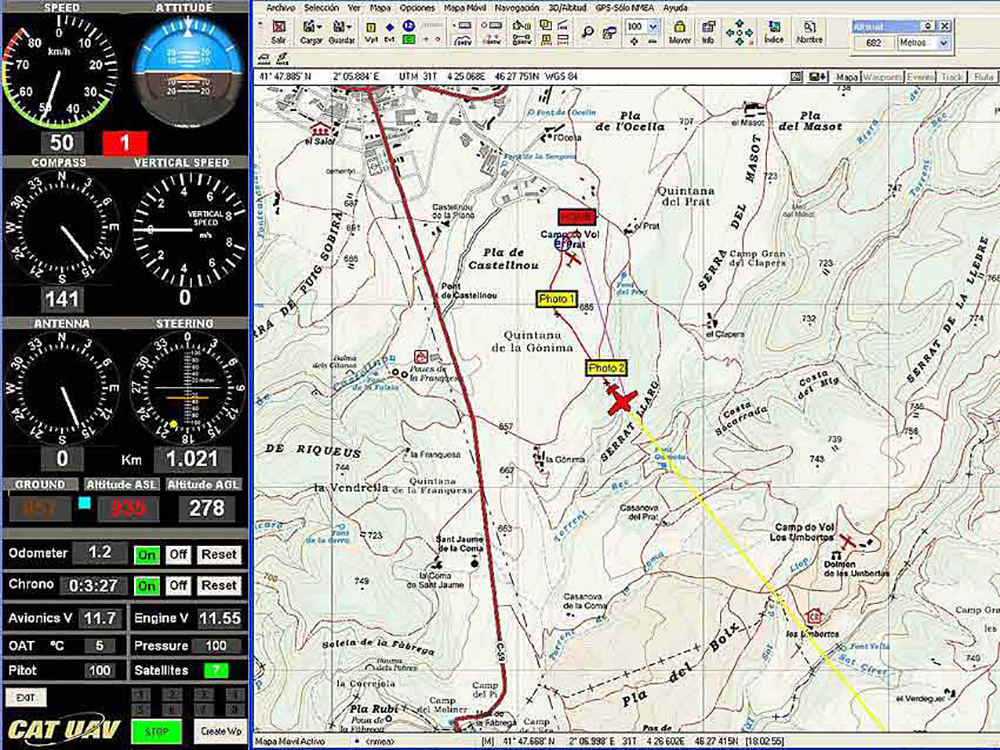
ITUMA – 2008 to 2010
ITUMA (Investigación de Tecnologías para un sistema integral UAV para control del Medio Ambiente) was a project subsidized by ACCIÓ that allowed CATUAV to strengthen its technological base. This project lasted for 3 years and brought together 4 companies (Aurensis, CATUAV, Geovirtual and Pildo Labs) and 2 subcontracted public agencies (CTAE and Institut de Geomàtica). The aim was to develop and test all necessary technologies to bring Earth observation environmental drone applications into a market stage. For CATUAV ...
Read More
Read More
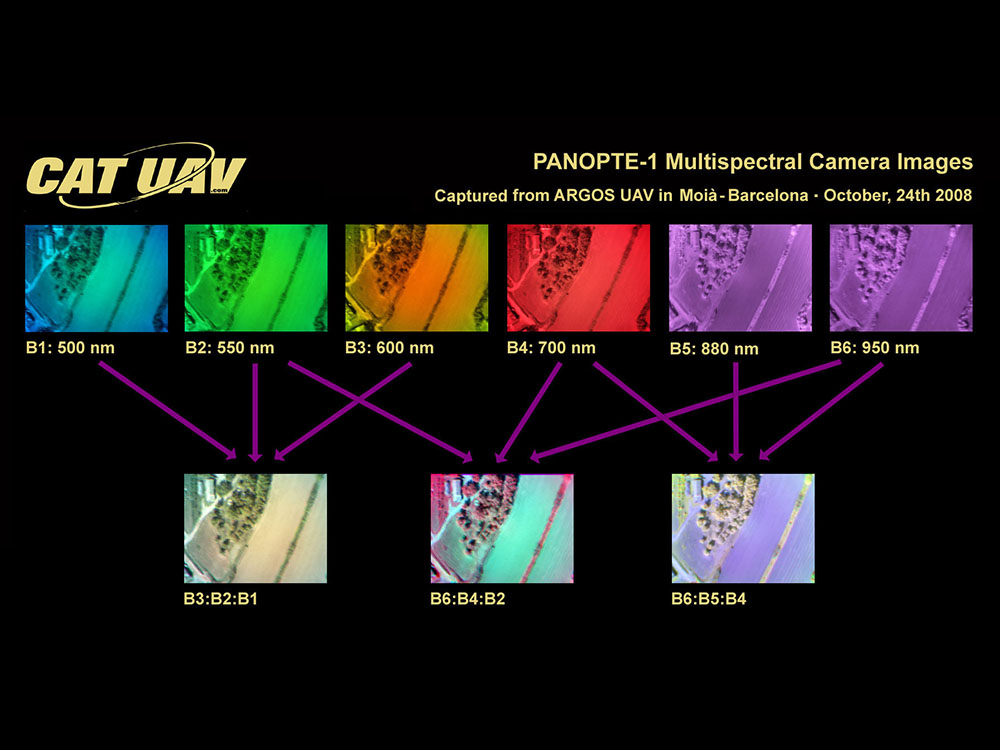
PANOPTE MULTISPECTRAL CAMERA – 2008
Before the appearance on the market of Micasense, Mapir, Parrot and DJI multispectral cameras, the only commercial option for multispectral cameras was offered by Tetracam, which, apart from being very expensive, due to their size and weight was not intended to be integrated into a small UAVs such as Atmos. Thanks to the experience of Dr. Manuel Castillo Fraile in remote sensing projects, CATUAV managed to develop a three-band camera based on the FOVEON sensor ...
Read More
Read More